Cloth Simulation
API: OpenGL
Duration: 2 Weeks
Language: C++
Team Size: 2
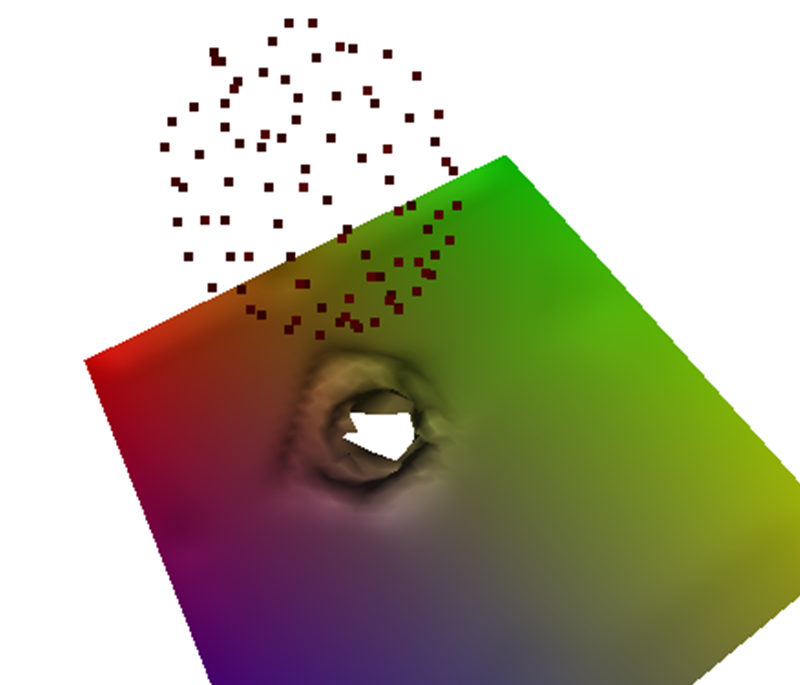
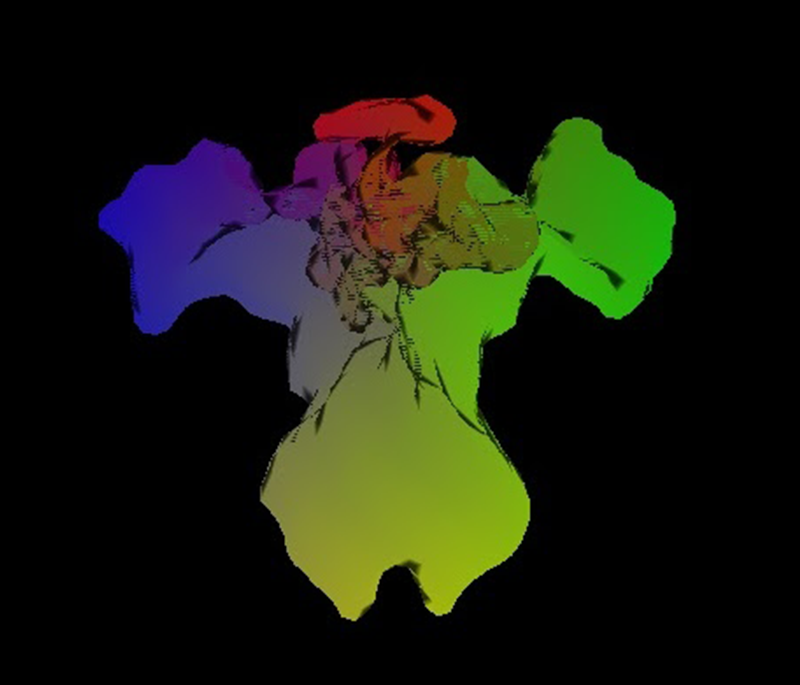
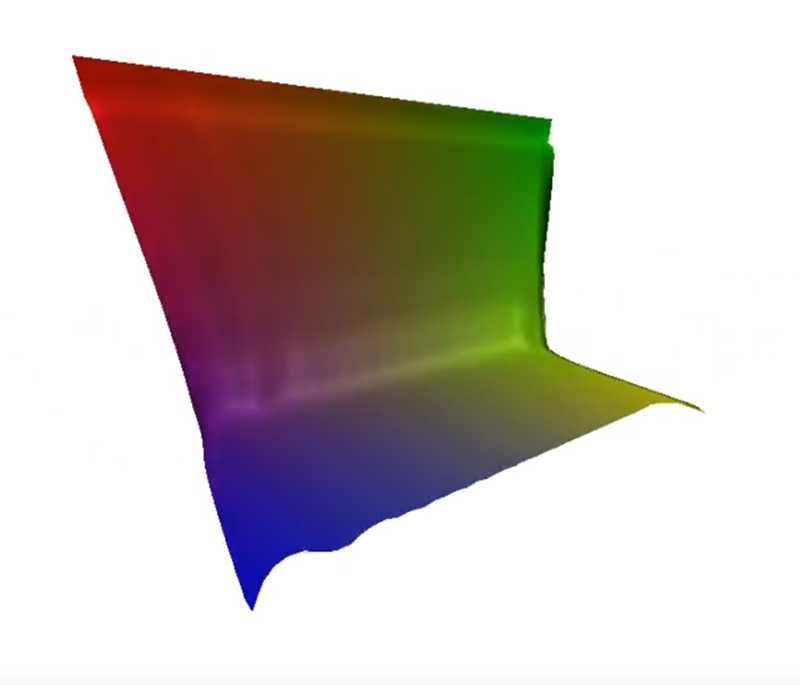
A classmate and I iterated on a mass-spring system to eventually build it into an entire cloth simulation with sphere collision capability. We intentially designed the spring force propogation through the cloth to minimize computation time, and we had to integrate the spring forces with a more accurate integration scheme than basic Eulerian to keep the simulation from diverging.
Notable Experiences
- Structured the simulation steps for Midpoint Integration.
- Designed our data and pipeline to handle tearing as elegantly as possible (including in the GPU).
- Utilized OpenMP on the many for-loops for a minor performance increase.
- Dealt with many issues regarding "realistic cloth" -- i.e. the weight of the cloth itself influencing its springs and all of the implications for more complex movements than hanging.